

今号のパーツ
右上腕フレーム(A)
右上腕フレーム(B)
サーボモーター用ハーネス90㎜(ID4:右肩用)
ハーネスローラー 2×4㎜ビス×7

今号の作業
右肘の関節部分を組み立てる
右上腕フレームを組み立てます。
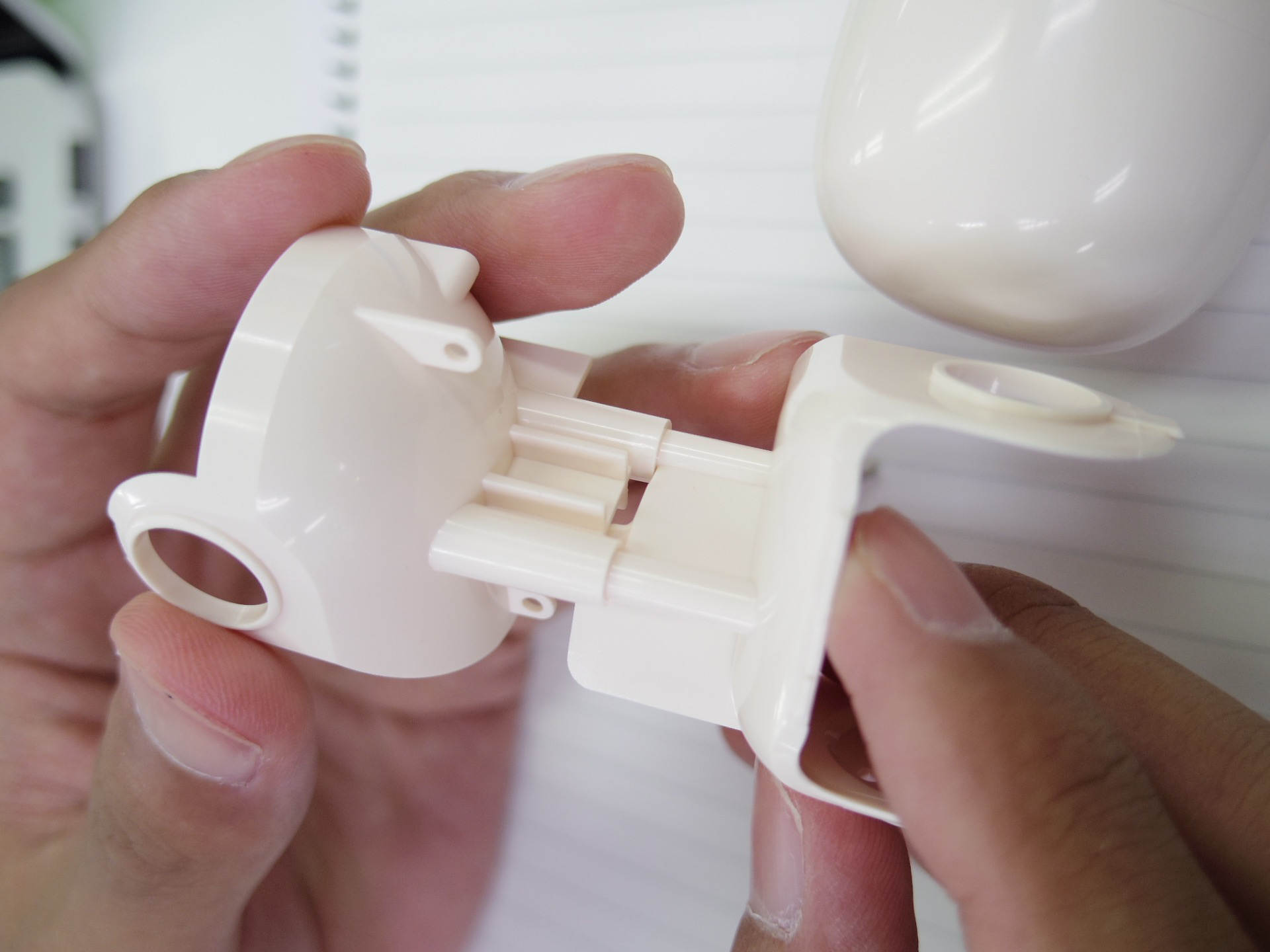
右上腕フレームを右前腕に取り付けます。

サーボホーンの穴の位置と右上腕フレームの穴の位置を合わせてビスで固定します。
まとめ
まだ実際に動かしてはいませんが、
いかにもロボットっぽい関節が完成してテンション上がりました。
本紙に”サーボホーンの取り付け位置がずれていると動作不良の原因となります”との記述があるため、モーター周りの作業するときは少し緊張します。
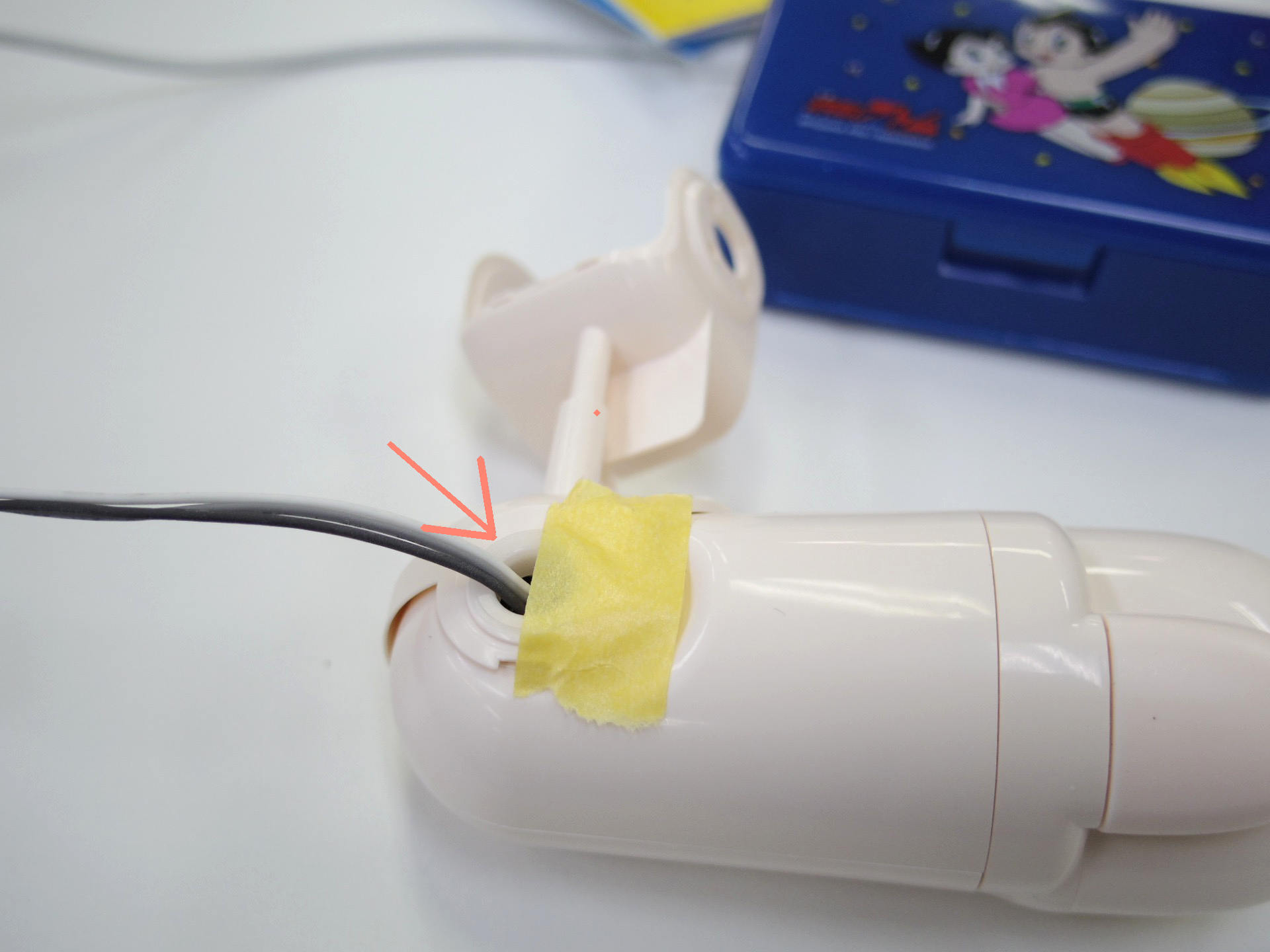
ハーネスが破損しないようにするための
ハーネスローラー(半透明のパーツ)が
ポロっと落ちて無くしてしまいそうなので
とりあえずマスキングテープで留めておきました。