

今号のパーツ
・右上腕カバー(C)
・右上腕カバー(D)
・3連ハブ基板
・2×4㎜ビス(赤色袋)×3

今号の作業
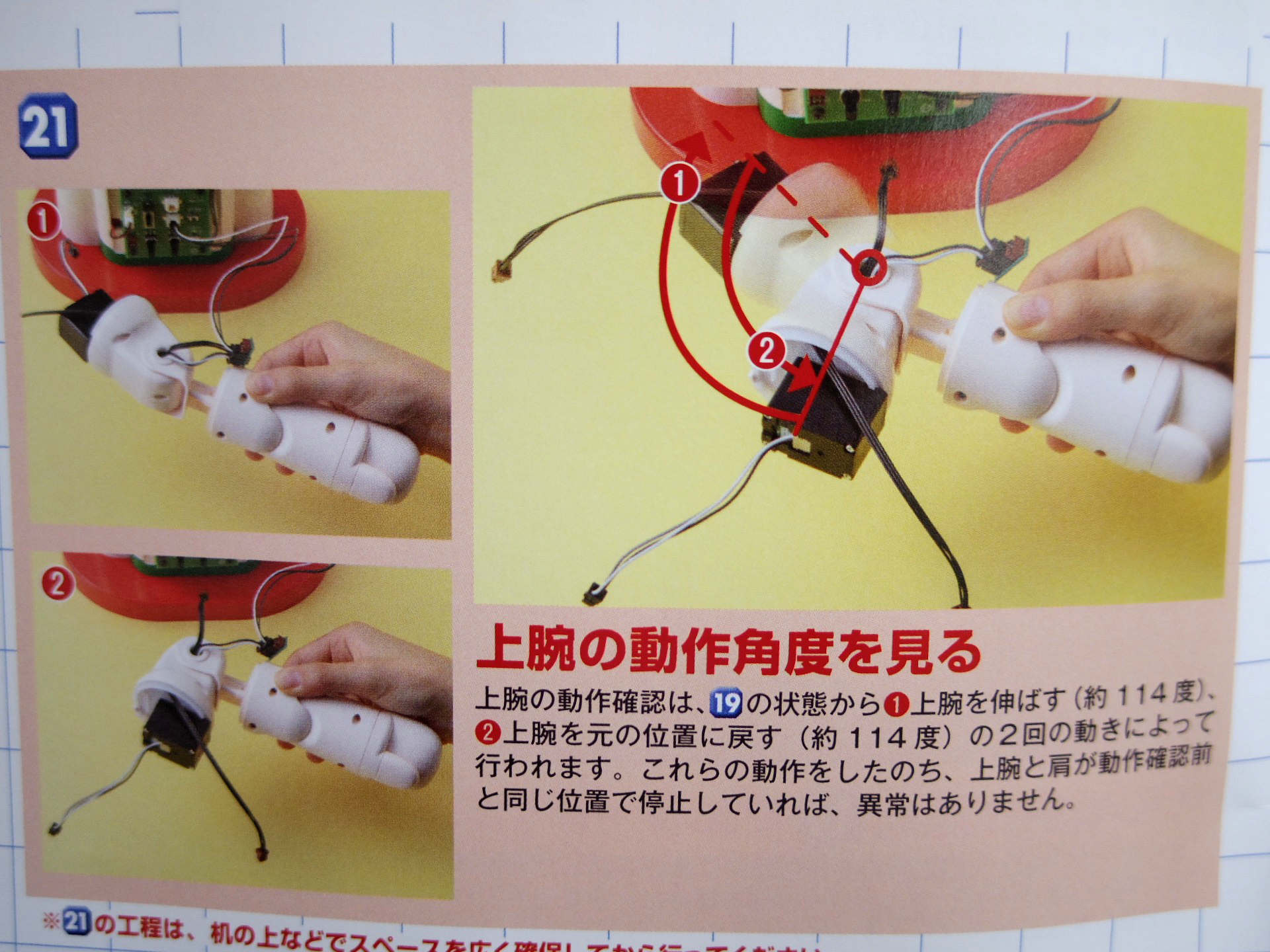
サーボモーターID6の動作確認を行う
チェックスタンドを用意し、
ID2のハーネスが抜けていることを確認します。
13号で完成した
「テスト基板用延長ハーネス」を
チェックスタンドに取り付けます。
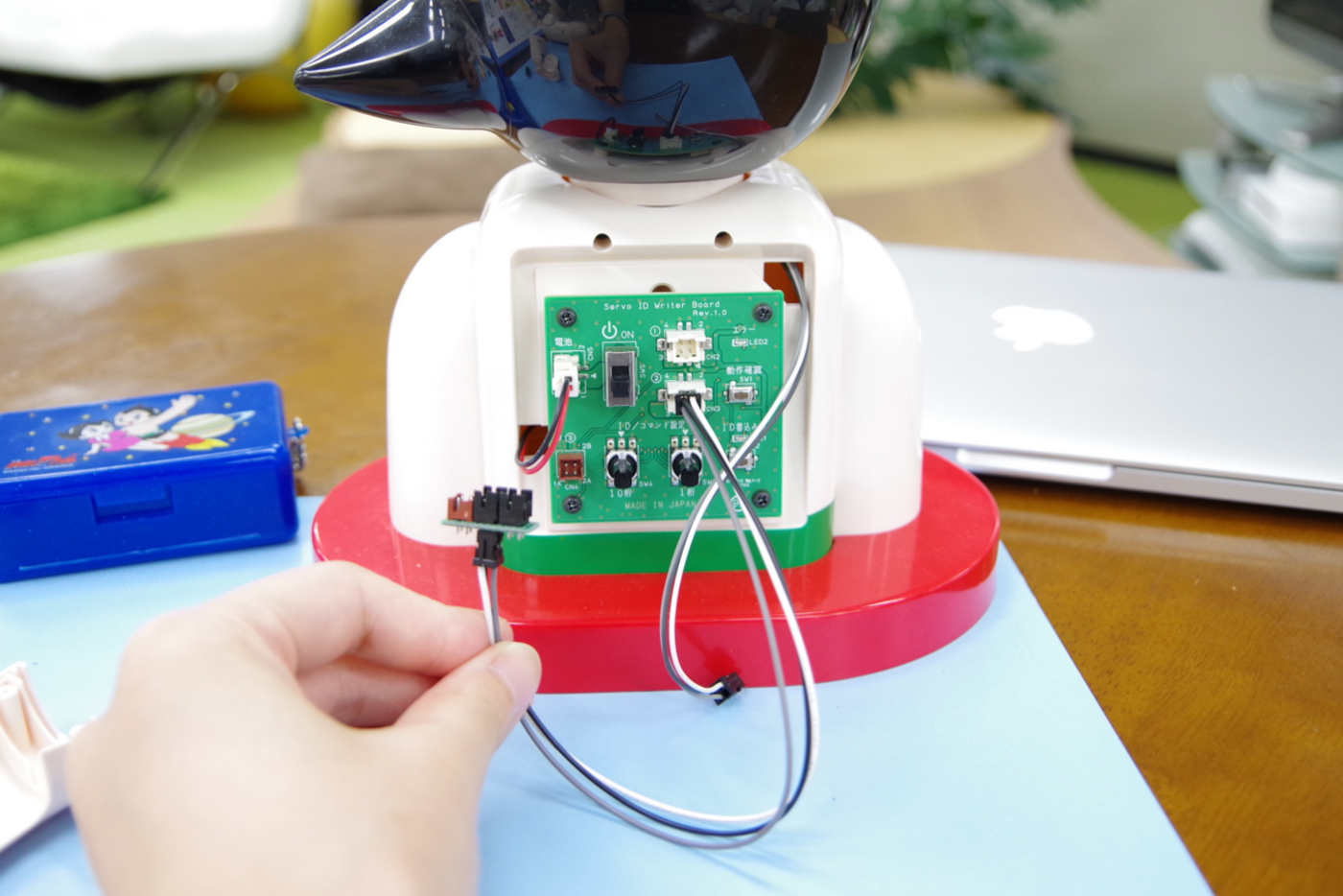
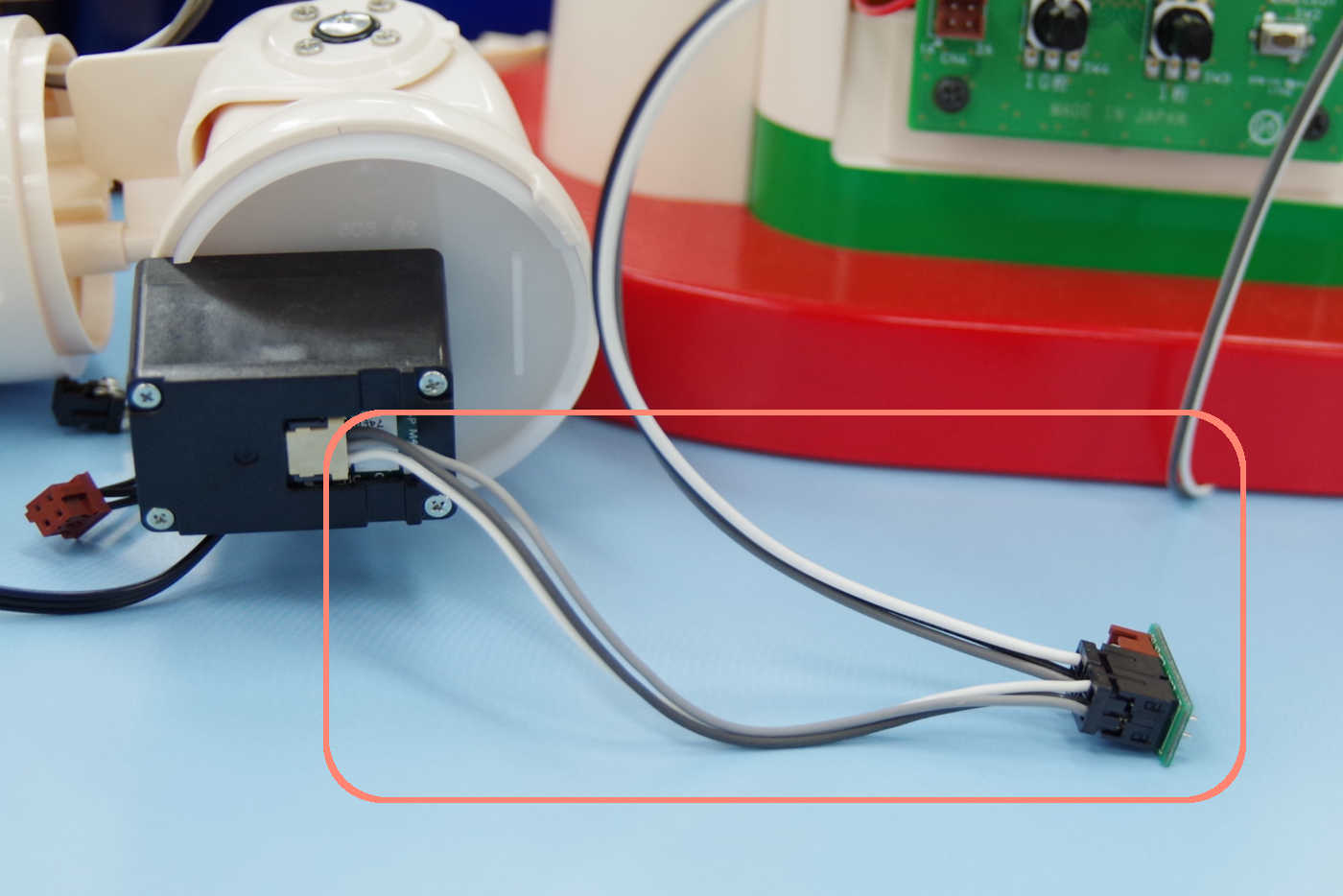
腕のID6のハーネスを
テスト基板用延長ハーネスの
3連ハブ基板に取り付けます。
サーボモーターが腕の中に埋め込まれているので分かりづらいですが
この子です。
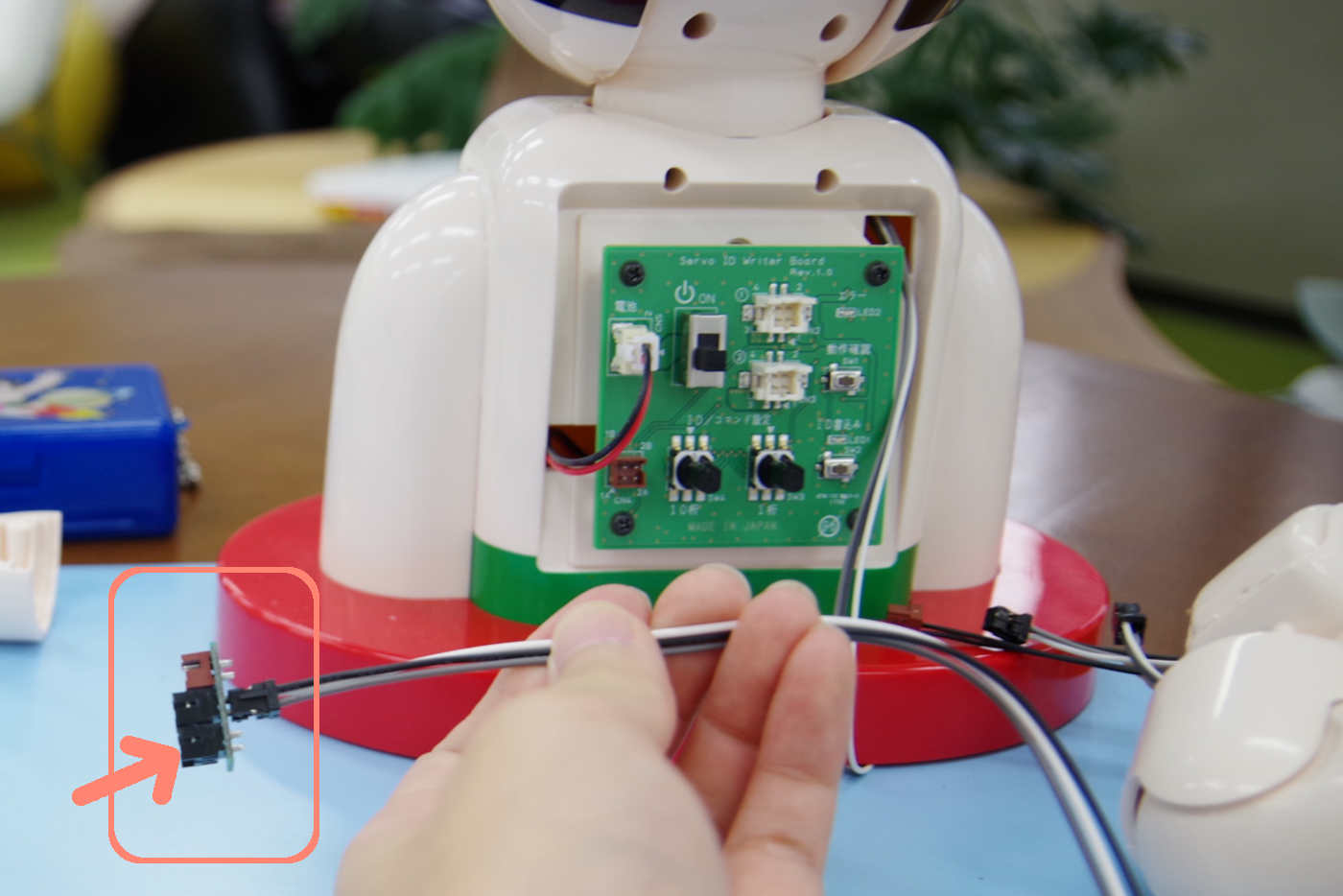
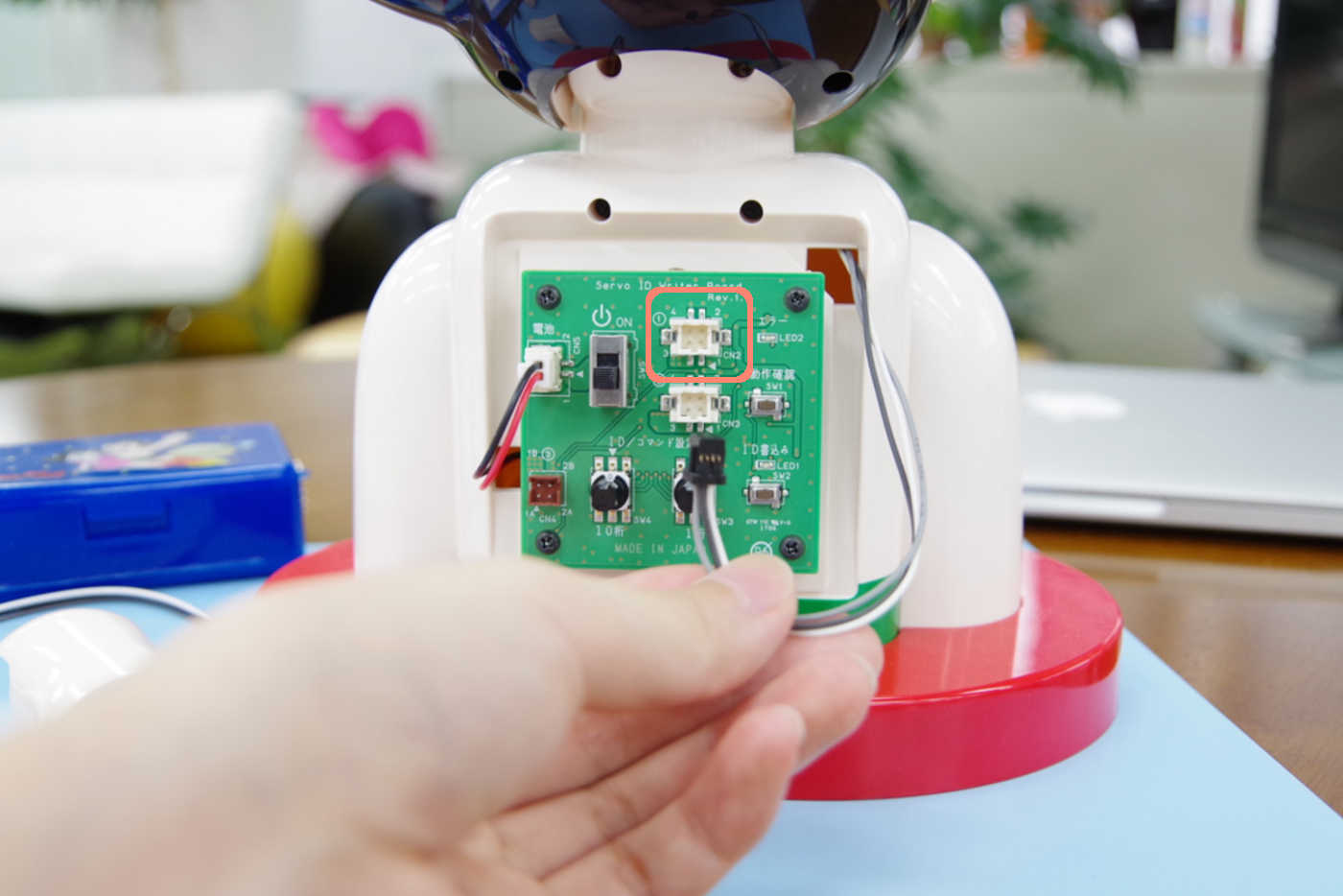
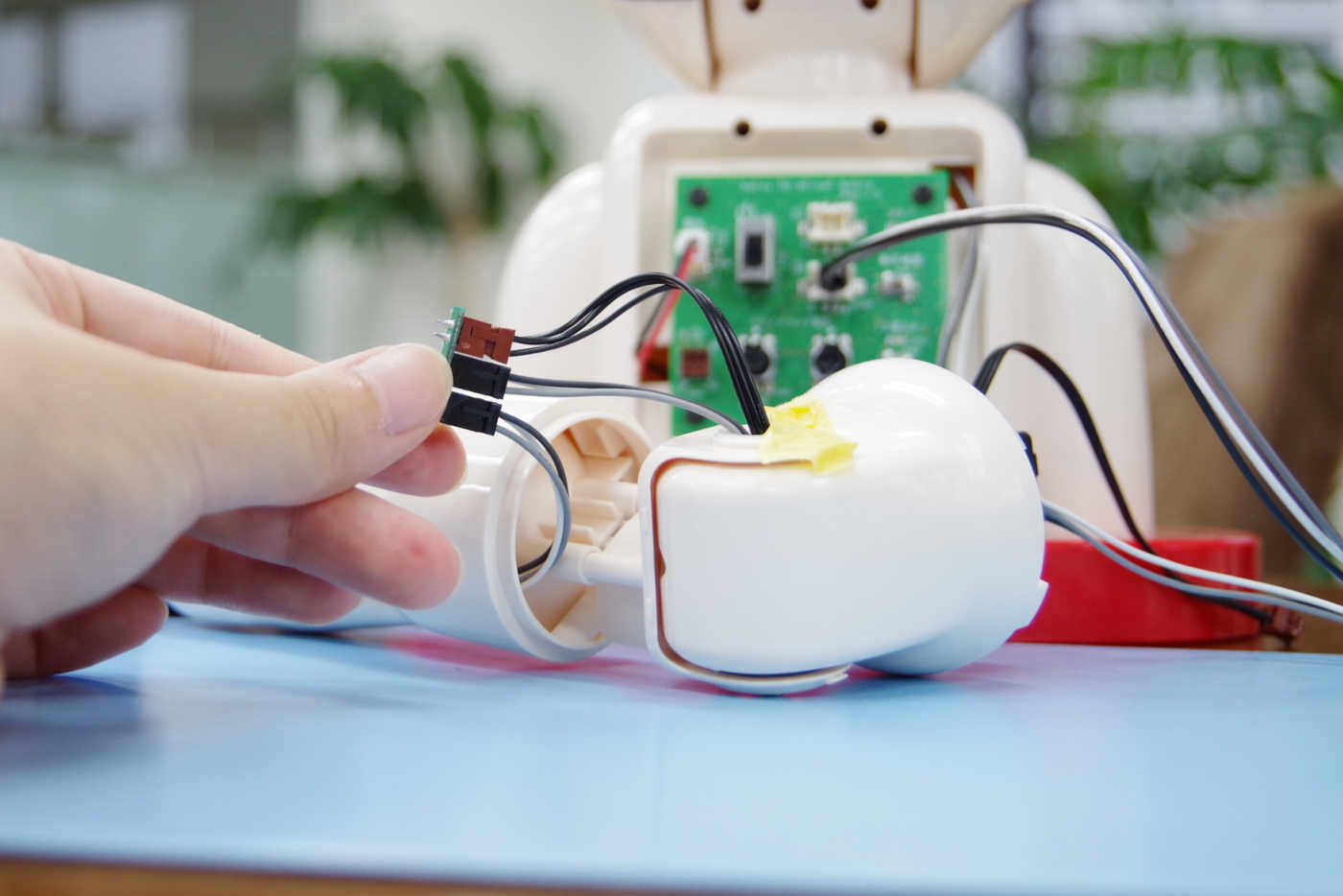
これを3連ハブの端の黒色ジャックに差し。。あれ。
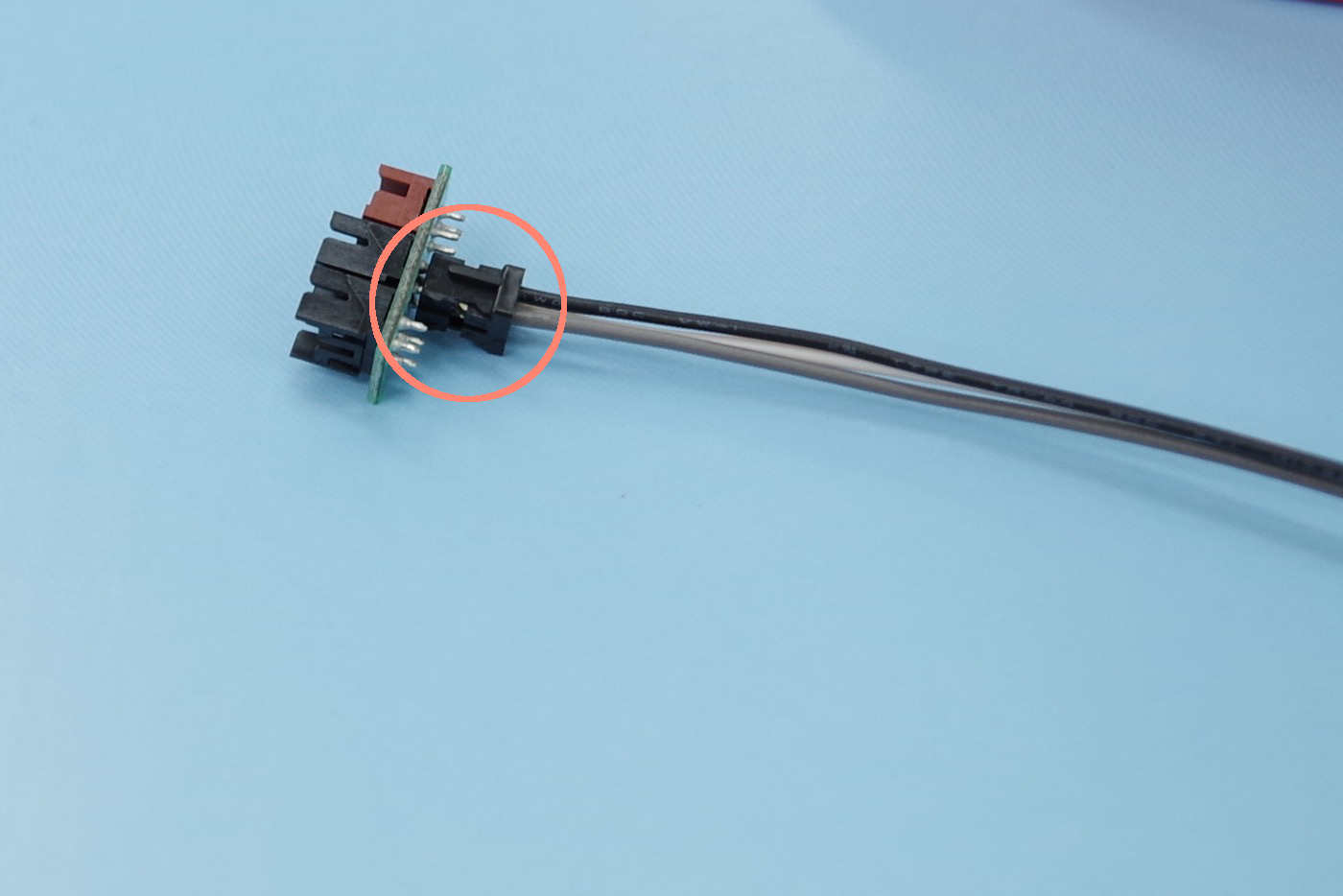
え。。?
真ん中のやつ、なんでジャックじゃなくて
裏側に挿してんだろう。。
焦って13号記事を見返すと見事に裏側に挿してます。
寝ぼけてたのかな。
(13号記事は修正しました。失礼しました。)
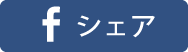
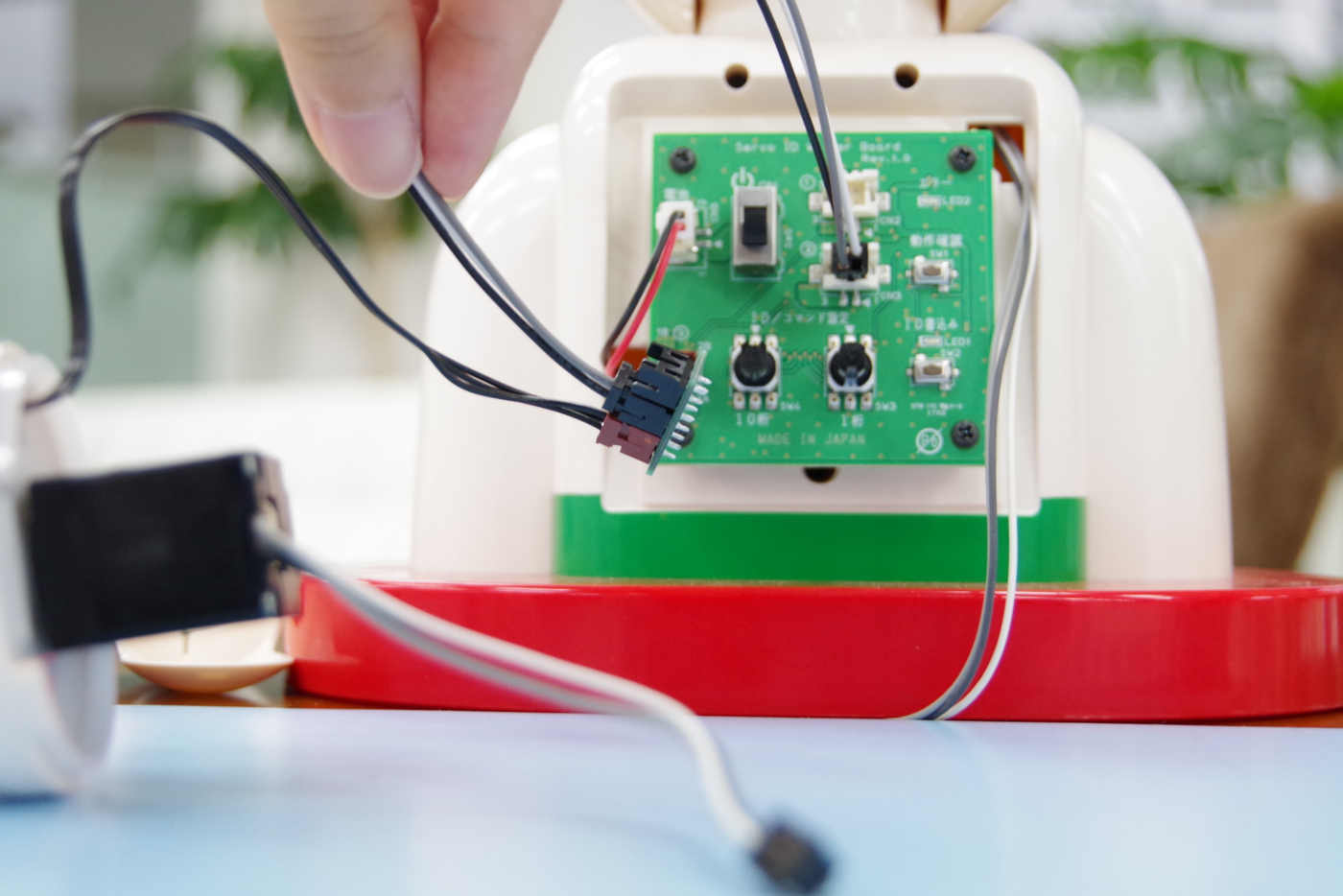
正しくはこう。

チェックスタンドのIDを「06」にして
電源ON。
腕の持ち方に注意して
「動作確認」ボタンを押します!
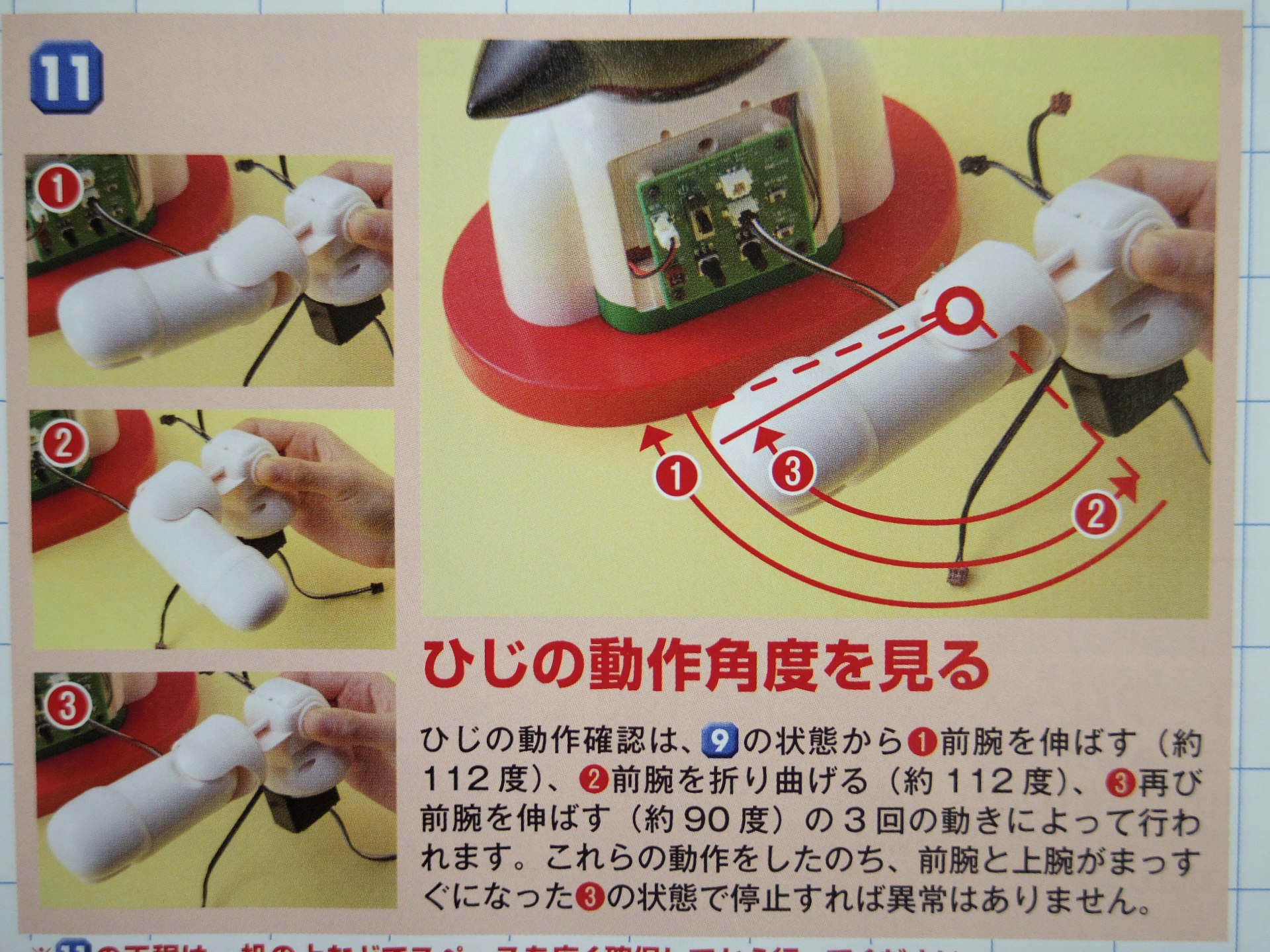
本誌の写真の通り動いてくれたので
動作確認完了です。
サーボモーターID5の動作確認を行う
先ほど3連ハブ基板に取り付けた
ID6のハーネスをID5のハーネスに
差し替えます。
ID5のサーボモーターも
腕の中に埋め込まれているので
分かりづらいですが、この黒い子です。
チェックスタンドのIDを「05」にして
電源をON。
腕の持ち方に注意して
「動作確認」ボタンを押します。
これも本誌の写真の通り動いてくれました。
サーボモーターID4の
動作確認を行う
同じように今度は
ID4のハーネスを3連ハブに取り付けます。
ID4のサーボモーターはこの見えている子です。
チェックスタンドのIDを「04」にして
電源をON。
腕の持ち方に注意して
「動作確認」ボタンを押

これも本誌(の訂正用の別紙)の写真の通り動いてくれました。
各モーターの動作確認は以上です。
ID4のハーネスはテスト基板用延長ハーネスから抜いておきます。
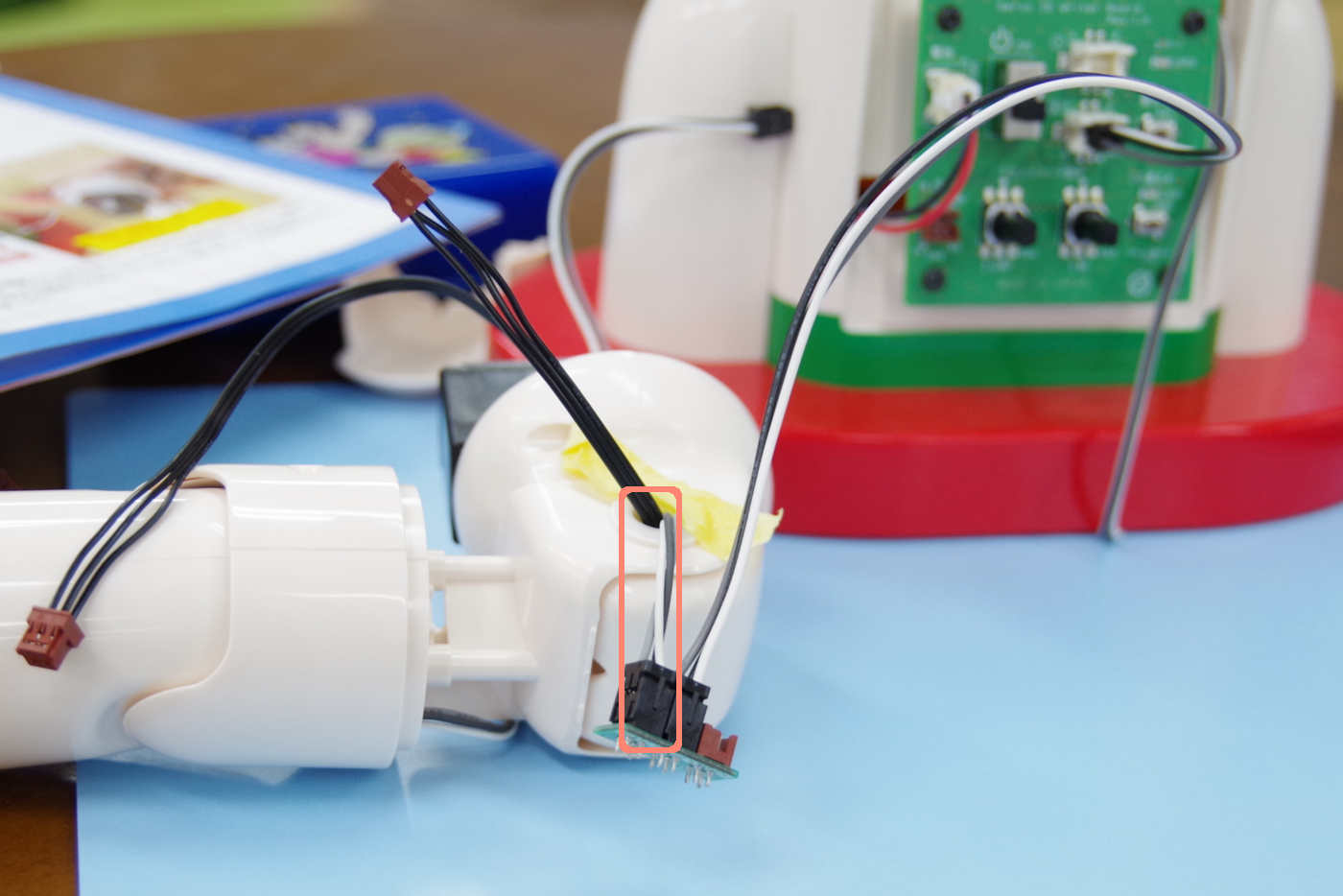
中継ハーネス経由の動作確認を行う
肩、肘から伸びているハーネスを
今号のパーツの3連ハブ基板に差します。
続いて、右肩ディスクから伸びている
中継ハーネス(茶色のコネクタ)を
テスト基板用延長ハーネスの
3連ハブ基板に差し込みます。
この状態でID6とID5の
サーボモーターの動作確認を行います。
うねうね動きました!
動作確認する関節ごとに
持ち方を替えなければいけない点に注意です。
これで右腕の動作確認は
全て完了です。
テスト基板用延長ハーネスから
中継ハーネスを外します。
右上腕カバーを取り付ける
3連ハブ基板を右上腕カバーの中に収めます。
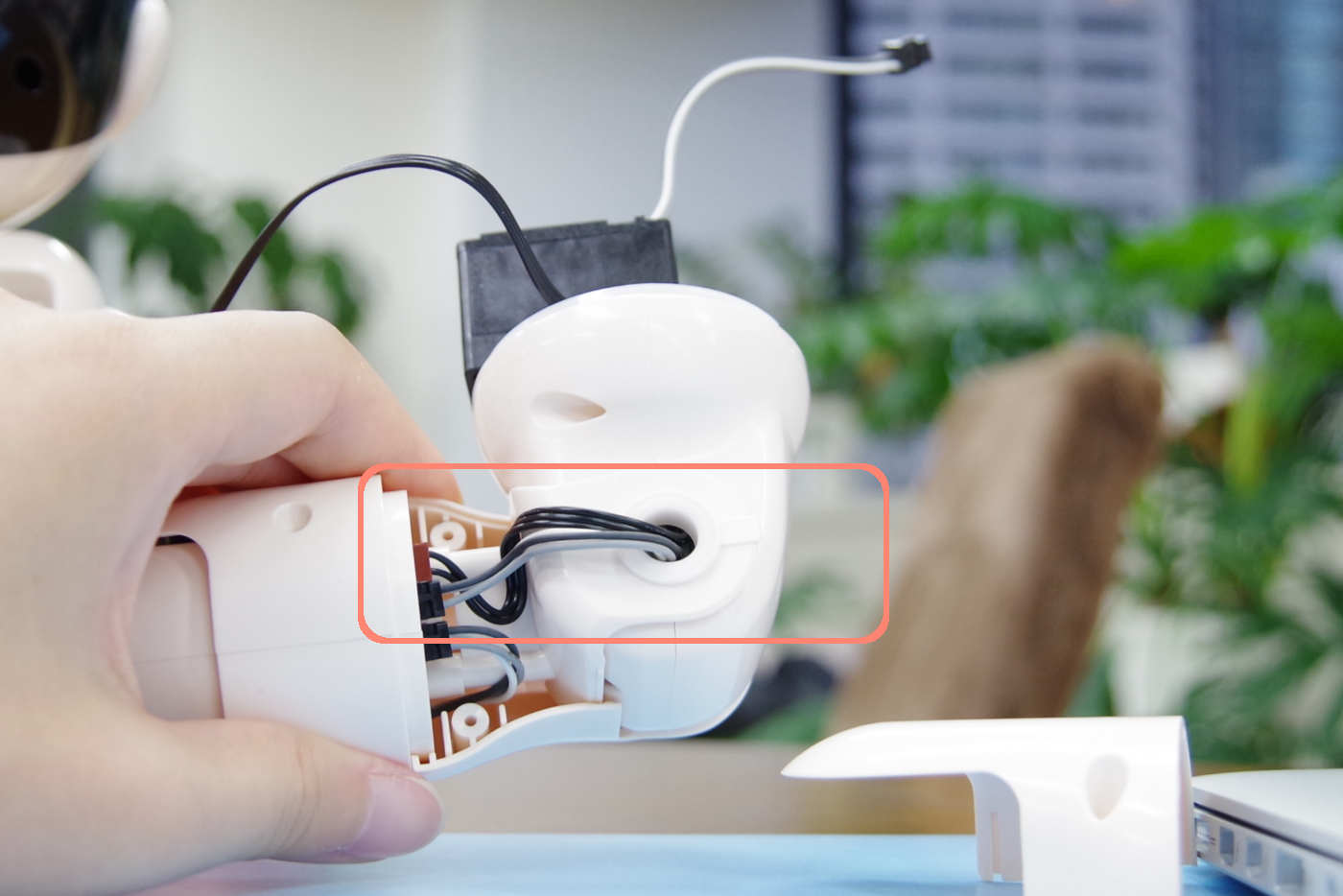
この時、肩の穴からまっすぐ伸びるように意識しました。
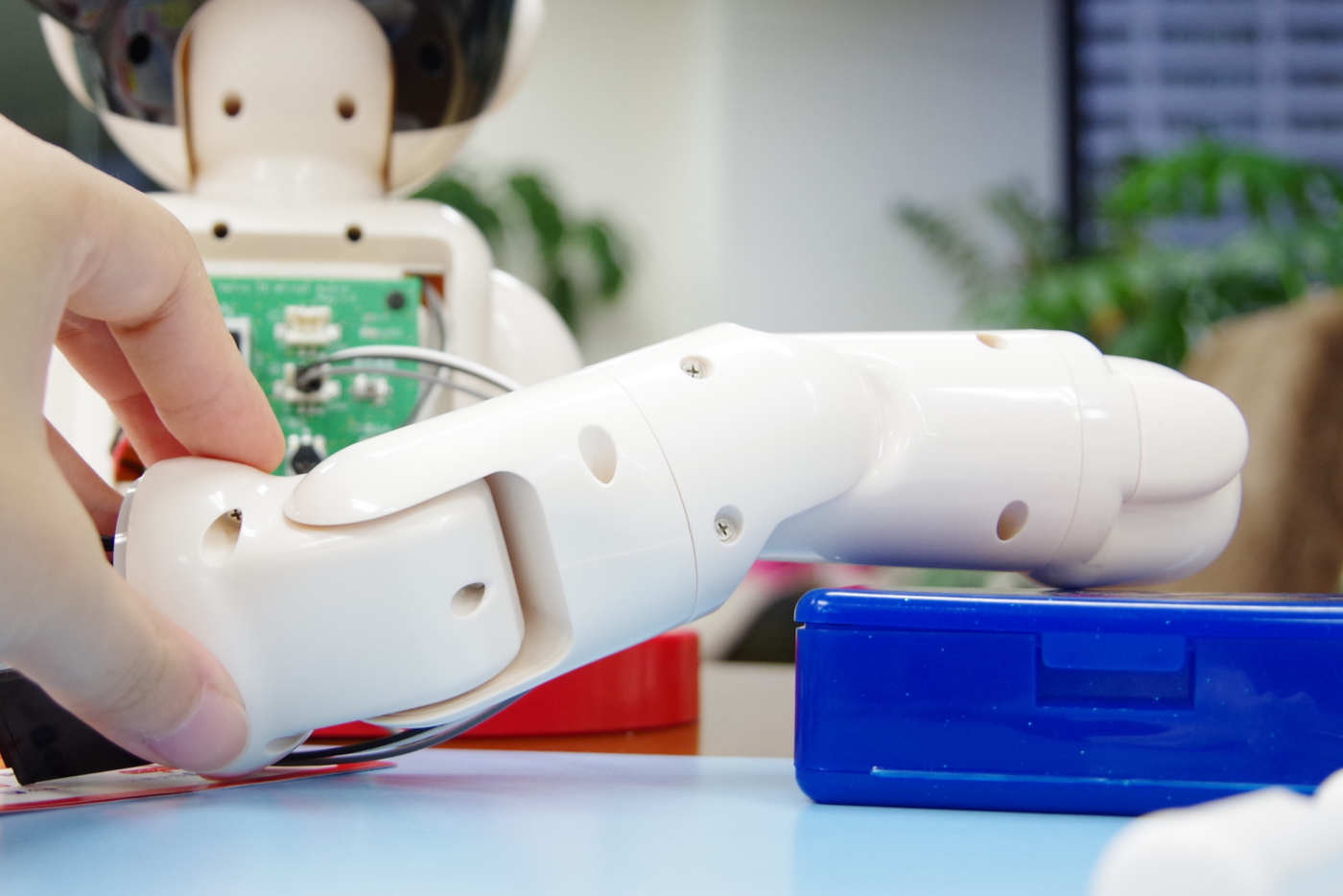
今号のパーツのカバーを取り付けて完成です!
完成した右腕は胴体の組み立て(60号予定)まで使わないそうです。
高温多湿を避けて保管することを推奨されています。
しばしのお別れです。。
まとめ
右腕が完成しました。
60号までこの子が動く様子は見れないのかと思うと
少し寂しいです。
思う存分動かして見納めとこう。
次号からは左腕の組み立てだそうです。
完成までの道のりが長すぎて
気が遠くなりそう。。

表紙のロボユニさんの服がかわいい
本誌のひとこと感想
週刊ロボットニュース
ー超リアルな「カーズ」のしゃべるロボットが発売!
動画を見ると本当にCGを見ているようです。
モーターやタッチセンサーなどを駆使して
アニメの世界を再現してある点に感動しました。